|
This project is a teathered underwater ROV equipped with a camera for shallow fresh water viewing and filming. The ROV is
about 8x8x14 inches in size. It is powered by three 12v miniture electric motors.








Bouyancy test May 17, 2006. It sank. Had to add more air tanks (PVC) to keep the ROV from sinking.

Thank goodness for duct tape! ROV now has a slight positive bouyancy. Back to the "factory" for more glue.


First stactic dive was a sucess. The camera worked good. The motors functioned underwater. Planning for the first controlled
dive next week.



The complete operating system. Works fine. Just add water.

Awkward to control ROV with toggle switches. Will add joysticks (later) for beter control.




Added two joysticks to control ROV. Also added Hover button (red button on the box). This allows the ROV to hover (hands
free with the touch of a button) and maintain the selected depth. (6/21/06)

Added dual joystick controller circuit. Building this circuit from scratch was a good challenge. (6/21/06)
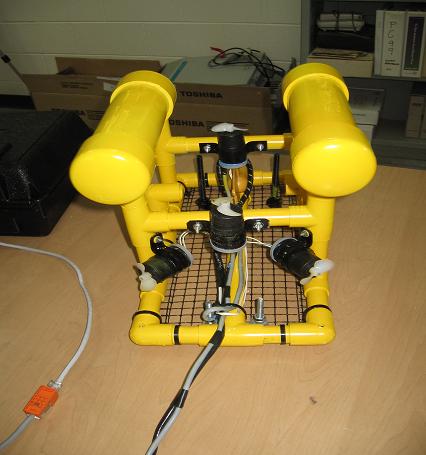
Added dual vertical thruster motors for better control. Dual thrusters allows a Hover capability and nose up/nose down capabilities.(6/21/06)

This is the student responsible for the wiring.
|